Limb Observations
Contents
Limb Observations¶
The handling of limb observations mainly relates to the definition and computation of the footprint geometry for any detector types observations that transition from surface to off-surface (atmosphere, exosphere, sky, or background planet or satellite).
It also relates to the associated Geometry Parameters depending on computed “observed-target” points, eg: center_latitude/longitude, westernmost/easternmost_longitude, min/max_phase_angle.
For a limb observation, it is important for end-users to distinguish between the surface and off-surface part of an observation and its footprint. Our initial approach was to treat them together as a single footprint, leading to possible visual artefacts and inaccurate search results in the PSA UI.
In a new approach, we first address limb observations by imaging instruments, modelled as LINE or FRAME detector in GEOGEN. The following figure illustrate the viewing geometry of a limb observation, and the different algorithmic approach required for a LINE and FRAME detector.
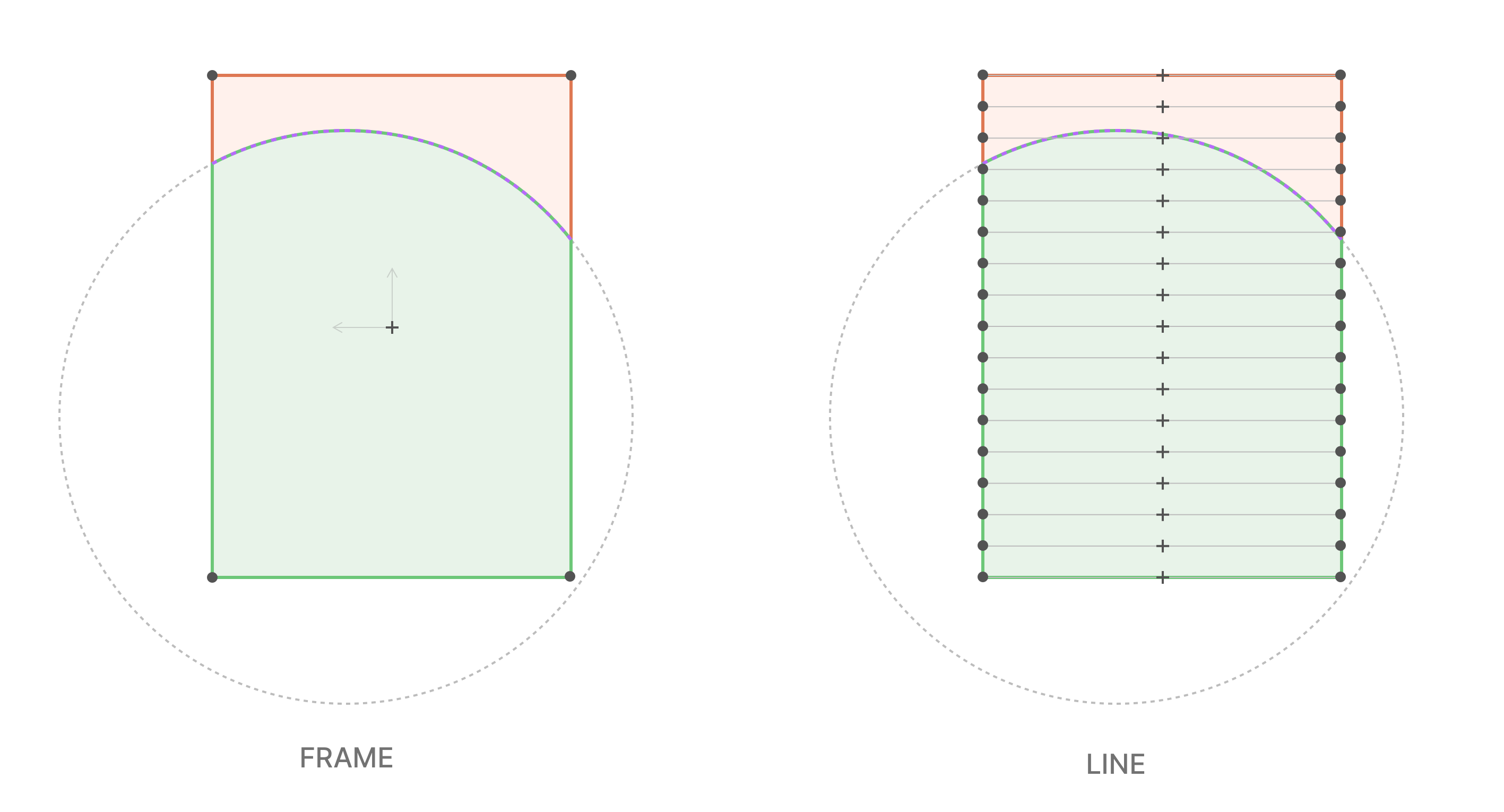
FRAME detector footprint¶
For a FRAME detector, we define the footprint as the surface-only part of the observation (green shape in the figure above).
The algorithmic approach is the following:
Compute FOV pointing vectors and target points
We evenly interpolate FOV pointing vectors along each FOV edge, using
geogen.coverage.Detector.get_geometry().Target points are computed using
geogen.coverage.Observation.compute_geometries()(geometry.target_point_latitudes/longitudes)
Compute limb points (in target reference frame) and limb directions vectors (in detector frame)
We use SPICE
limbptfunction, which works with DSK shape models.Computed using
geogen.coverage.Observation.compute_geometries()
Derive footprints coordinates, using
geogen.coverage.Observation.derive_footprint()Exclude off-surface target points (tangent altitude equal to 0)
Exclude limb point not in detector FOV
Sort footprint coordinates so as to form a “regular/valid pyramid/shape”
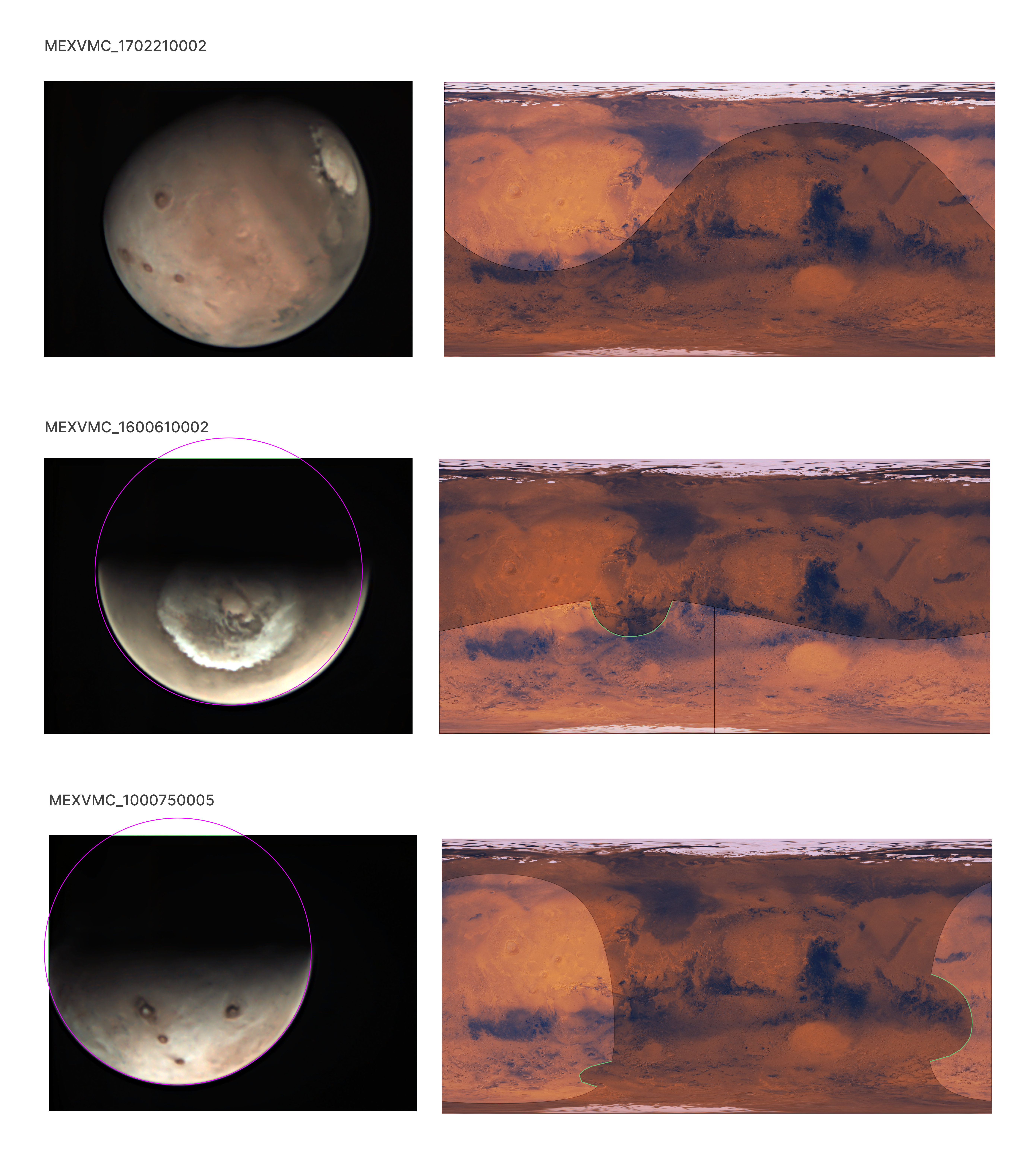
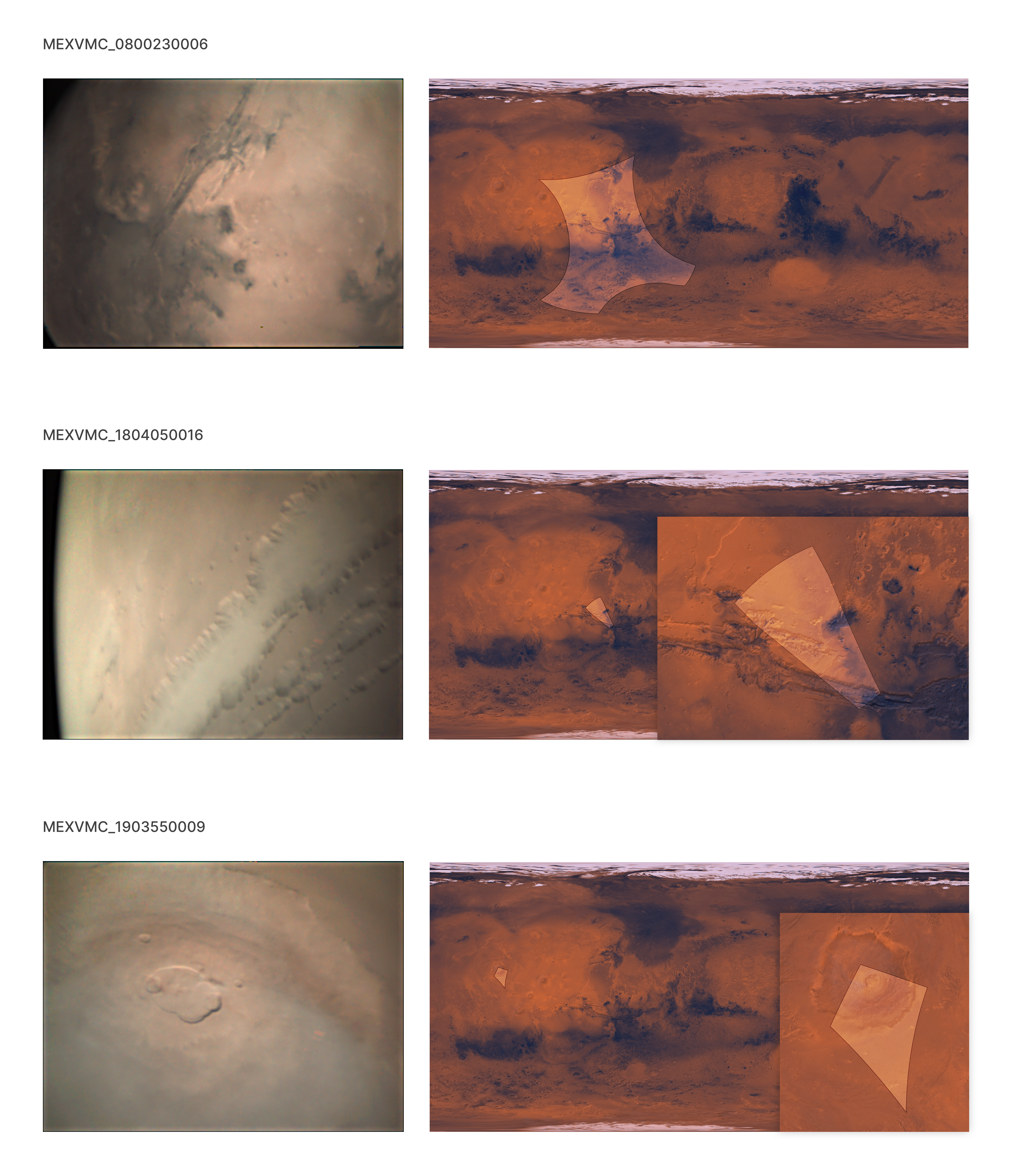
This algorithm has been tested against a set HRSC SRC and VMC instruments observations of Mars and Phobos that are
listed in limb_sample_test.plf file. The following figure shows side-by-side MEX VMC observation browse images and
corresponding spit footprint.
Phobos
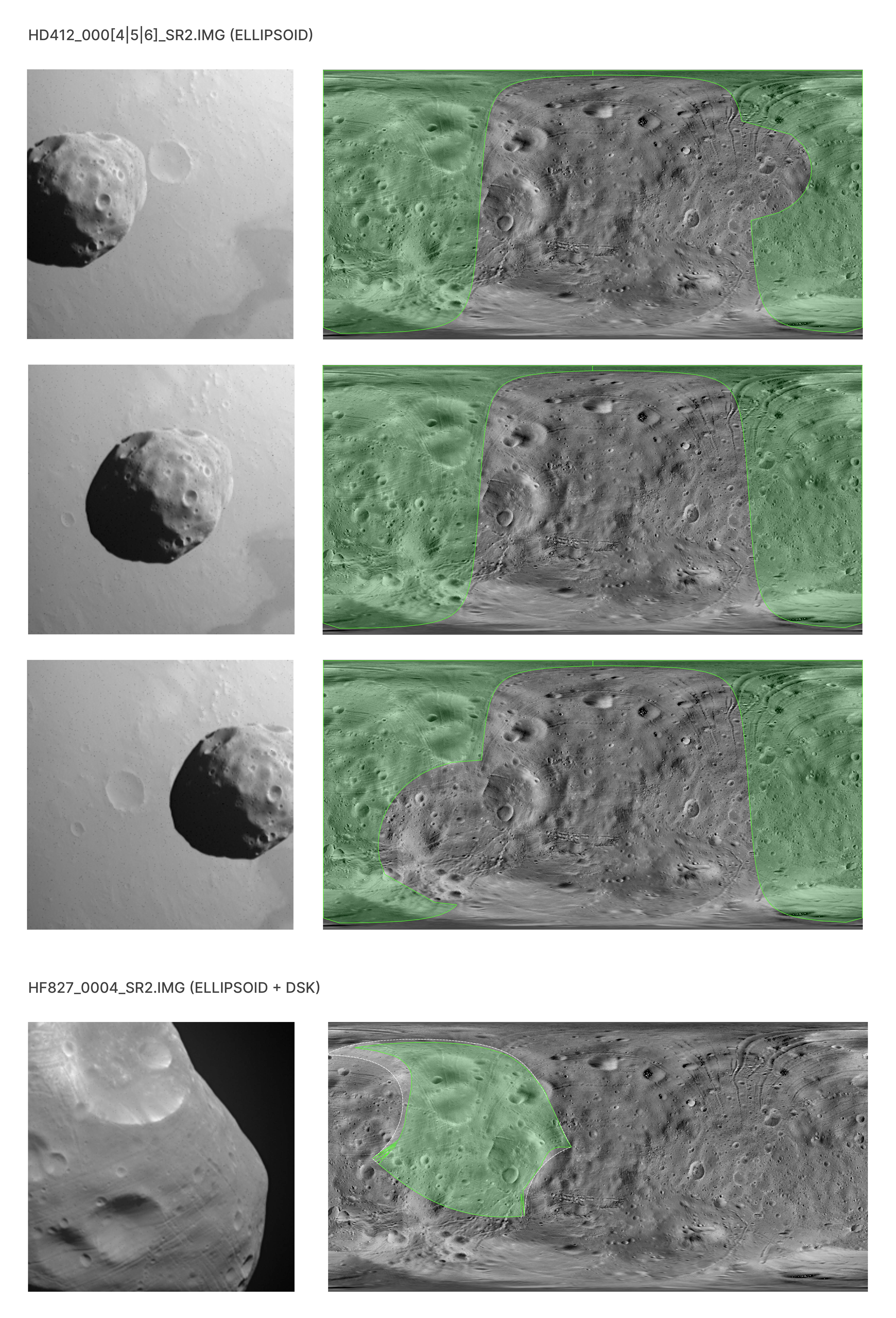
Note
The visual artefact seen in DSK-based footprints needs to be investigated.
LINE detector footprint¶
Limb points computation will require the development of a new function, as the SPICE limbpt routine can not be used
in this case. This new function could also be used for FRAME detector as an alternative method, and for validation.